

教师简介
jbo竞博电竞官方网站副教授,博士生导师,广东省杰出青年基金获得者,入选全球前2%顶尖科学家榜单,jbo竞博电竞官方网站“百人计划”引进人才,IEEE高级会员。在法国国家科研中心攻读博士学位,之后在新加坡国立大学、新加坡科技与设计大学从事科研工作。主持和参与包括国家自然科学基金面上、省杰青、省面上、广州市重点研发、腾讯犀牛鸟等多个科研项目。研究围绕各类机器人与具身智能系统的建模、设计、仿真、优化、规划与控制,内容涵盖基础研究和应用开发。目前已发表及录用上百篇论著,包括期刊(如机器人、自动化和人工智能领域顶级期刊 IJRR、IEEE T-RO、IEEE/ASME TMECH、IEEE T-ASE、IEEE RA-L、IEEE TNNLS、IEEE TFS、IEEE TCYB、IEEE TSMCS、IEEE TIE、IEEE TII、IEEE TCDS、IEEE TIM、IEEE/CAA JAS等)、国际会议论文(包括机器人领域顶级会议RSS、IEEE ICRA等)、书及书中章节,授权发明专利10余项(美国专利一项)。研究成果获得了美国CNBC频道、EmTech世界新兴技术峰会、新加坡《海峡时报》、新加坡《联合早报》的广泛关注与报道。获得第五届中国机器人行业年会机器人技术突破奖,广东省计算机学会青年科技奖,广东省人工智能产业协会青年科技创新奖,ISAS2020的最佳论文奖,IRAC2024和ROBIO2022 的最佳论文提名奖。担任中国教育发展战略学会人工智能与机器人教育专委会理事,粤港澳大湾区人工智能产业智库专家,CAA混合智能专委会委员,广东省精准医学应用学会医疗机器人分会委员,入选《机械工程学报》、Robot Learning和Biomimetic Intelligence and Robotics (BIRob)期刊青年编委,担任国际期刊Micromachines的Topical Advisory Panel成员/Topic Editor,Frontiers in Robotics and AI的Guest Associate Editor,以及参与多个国际会议的组织工作。入选TMECH Junior Reviewer Program (TJRP),担任多个机器人领域顶级国际期刊/会议的审稿人。指导学生获国家自然科学基金青年学生项目(博士生),CCF智能机器人专委会硕士学位论文激励计划,广东省研究生学术论坛“智能制造与机器人”分论坛口头报告一等奖,粤港澳优秀研究生论文大赛一二三等奖,jbo竞博电竞官方网站校级优秀本科毕业论文奖。
长期欢迎对机器人和人工智能感兴趣的博士、硕士研究生与各年级优秀本科生加入实验室,
长期招收自动化、计算机、机械、电子等领域的博士后、特聘副研究员与研究员。
研究领域
- 机器人 (智能机器人、智能控制、医疗机器人、多机器人协同、仿生机器人)
- 人工智能(具身智能、机器学习/深度学习、多模态大模型、类脑计算、机器视觉的算法研究,及其与机器人的结合)
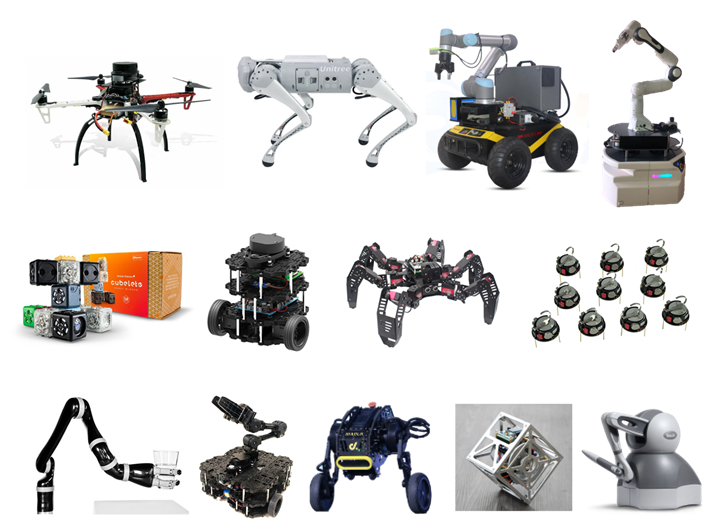
现有部分机器人研究平台

工作经历
2018/09至今;jbo竞博电竞官方网站(SYSU),副教授,“百人计划”引进人才
2018/02-2018/09;新加坡科技与设计大学(SUTD),Research Fellow
2016/05-2017/11;新加坡国立大学(NUS),Research Fellow
2014/05-2016/05;新加坡科技与设计大学(SUTD),Postdoctoral Research Fellow
海外经历
2018/02-2018/09;新加坡科技与设计大学(SUTD),Research Fellow
2016/05-2017/11;新加坡国立大学(NUS),Research Fellow
2014/05-2016/05;新加坡科技与设计大学(SUTD),Postdoctoral Research Fellow
2010/05 - 2013/12;法国CNRS Femto-st研究所,博士生/研究助理
获奖及荣誉
广东省杰出青年基金获得者
入选全球前2%顶尖科学家榜单(World's Top 2% Scientists)
第五届中国机器人行业年会机器人技术突破奖
广东省计算机学会科学技术奖——青年科技奖
广东省人工智能产业协会科学技术奖——青年科技创新奖
Best Paper Nomination Award(大会最佳论文提名),International Conference on Intelligent Robotics and Automatic Control (IRAC 2024)
Robotica Best Paper Finalist (大会最佳论文提名奖),IEEE International Conference on Robotics and Biomimetics (ROBIO 2022)
Best Paper Award (大会最佳论文奖),The 4th International Symposium on Autonomous Systems (ISAS 2020)
代表性论著:
“Behavior-Predefined Adaptive Control for Heterogeneous Continuum Robots”, The International Journal of Robotics Research (IJRR), 2024. (机器人三大顶刊)
“Accuracy Quantification and Improvement of Serial Micropositioning Robots for In-Plane Motions”, IEEE Transactions on Robotics (T-RO), vol. 31, no. 6, pp. 1497-1507, 2015. (机器人三大顶刊)
“Predefined-Time Convergent Motion Control for Heterogeneous Continuum Robots”, in Robotics: Science and Systems (RSS) XIX, Daegu, Republic of Korea, Jul 10-14, 2023. (机器人Top1顶会)
“Dexterity Online Optimization of Robotic Endoscopes Based on the Constrained Condition Number under RCM Constraints”, IEEE/ASME Transactions on Mechatronics, 2025.
"Predefined-Time-Synchronized Whole-Body Control of Velocity-Controlled Mobile Manipulators With Unknown Kinematics", IEEE Transactions on Industrial Electronics, 2025.
“A Hybrid Neurodynamic Scheme for Bimanual Synchronized Tracking Control of Robotic Manipulators with Uncertain Kinematics”, IEEE Transactions on Industrial Informatics, 2025.
“Multitarget Pursuit-Evasion Based on Distributed and Competitive Mechanisms”, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024.
“Unifying Obstacle Avoidance and Tracking Control of Redundant Manipulators Subject to Joint Constraints: A New Data-Driven Scheme”, IEEE Transactions on Cognitive and Developmental Systems, 2024.
“Discrete Quad Neural Dynamics for Inverse-Free Control of Model-Unavailable Continuum Robots”, IEEE Transactions on Industrial Electronics, 2024.
“基于大模型的具身智能系统综述”,自动化学报, 2024.
“基于变参递归网络和递归最小二乘的连续体机器人控制”,自动化学报, 2024.
“Motion Control of Legged Robots Based on Gradient Central Pattern Generators”, Robotica, 2024.
"Causal Actions Recognition for Efficient Exploration in Robotic Reinforcement Learning", 2024 International Conference on Intelligent Robotics and Automatic Control (IRAC), Guangzhou, China, 2024. (Best Paper Nomination Award)
“Predefined-Time Convergent Kinematic Control of Robotic Manipulators with Unknown Models Based on Hybrid Neural Dynamics and Human Behaviors”, IEEE Transactions on Neural Networks and Learning Systems, 2023.
“Model-Free Synchronous Motion Generation of Multiple Heterogeneous Continuum Robots”, IEEE Transactions on Industrial Informatics, 2023.
“A Fuzzy-Enhanced Robust DZNN Model for Future Multi-Constrained Nonlinear Optimization with Robotic Manipulator Control”, IEEE Transactions on Fuzzy Systems, 2023.
“Model-Free Kinematic Control of Redundant Manipulators with Simultaneous Joint-Physical-Limit and Joint-Angular-Drift Handling”, ISA Transactions, 2023.
“Cerebellum-Inspired Model-Free Tracking Control and Visual Servoing of a Rigid-Flexible Hybrid Robotic Endoscope with RCM Constraints”, IEEE Transactions on Industrial Electronics, 2023.
“Position-Based Visual Servo Control of Dual Robotic Arms with Unknown Kinematic Models: A Cerebellum-Inspired Approach”, IEEE/ASME Transactions on Mechatronics, 2023.
“Uncalibrated and Unmodeled Image-Based Visual Servoing of Robot Manipulators Using Recurrent Neural Networks”, IEEE Transactions on Cybernetics, 2023.
“A Competition-Based Distributed Scheme for Solving Multi-Robot Cooperative Pursuit Problems”, in: IEEE International Conference on Robotics and Biomimetics (ROBIO), Xishuangbanna, China, 2022. (Robotica Best Paper Finalist)
“Comparative Studies and Performance Analysis on Neural-Dynamics-Driven Control of Redundant Robot Manipulators with Unknown Models”, Engineering Applications of Artificial Intelligence, 2022.
“Towards Unified Adaptive Teleoperation Based on Damping ZNN for Robotic Manipulators with Unknown Kinematics”, IEEE Transactions on Industrial Electronics, 2022.
“Data-Driven Control of Continuum Robots Based on Discrete Recurrent Neural Networks”, IEEE Transactions on Industrial Informatics, vol. 19, no. 5, pp. 7088-7098, 2023.
“A Novel Discretized ZNN Model for Velocity Layer Weighted Multicriteria Optimization of Robotic Manipulators with Multiple Constraints”, IEEE Transactions on Industrial Informatics, vol. 19, no. 5, pp. 6717-6728, 2023.
“Two Model-Free Schemes for Solving Kinematic Tracking Control of Redundant Robot Manipulators Based on CMAC Networks”, Applied Soft Computing, 2022.
“Recurrent Neural Networks as Kinematics Estimator and Controller for Redundant Manipulators Subject to Physical Constraints”, Neural Networks, 2022
“A New Noise-Tolerant Dual-Neural-Network Scheme for Robust Kinematic Control of Robotic Arms with Unknown Models”, IEEE/CAA Journal of Automatica Sinica, 2022
“New Varying-Parameter Recursive Neural Networks for Model-Free Kinematic Control of Redundant Manipulators with Limited Measurements”, IEEE Transactions on Instrumentation and Measurement, 2022.
“A Dual Fuzzy-Enhanced Neurodynamic Scheme for Model-Less Kinematic Control of Redundant and Hyper-Redundant Robots”, IEEE Transactions on Fuzzy Systems, 2022.
“A Discrete Model-Free Scheme for Fault Tolerant Tracking Control of Redundant Manipulators”, IEEE Transactions on Industrial Informatics, 2022.
“A Cerebellum-Inspired Network Model and Learning Approaches for Solving Kinematic Tracking Control of Redundant Manipulators”, IEEE Transactions on Cognitive and Developmental Systems, 2022.
“Neural-Dynamics-Enabled Jacobian Inversion for Model-Based Kinematic Control of Multi-Section Continuum Manipulators”, Applied Soft Computing, vol. 103, pp. 1-15, 2021.
“Neural-Network-Based Control of Wheeled Mobile Manipulators with Unknown Kinematic Models”, The 4rd International Symposium on Autonomous Systems (ISAS), Guangzhou, China, 2020. (Best Paper Award)
“Model-Free Motion Control of Continuum Robots Based on a Zeroing Neurodynamic Approach”, Neural Networks, vol. 133, no. 2021, pp. 21-31, 2020.
“Pose Characterization and Analysis of Soft Continuum Robots With Modeling Uncertainties Based on Interval Arithmetic”, IEEE Transactions on Automation Science and Engineering, vol. 16, no. 2, pp. 570-584, 2019.
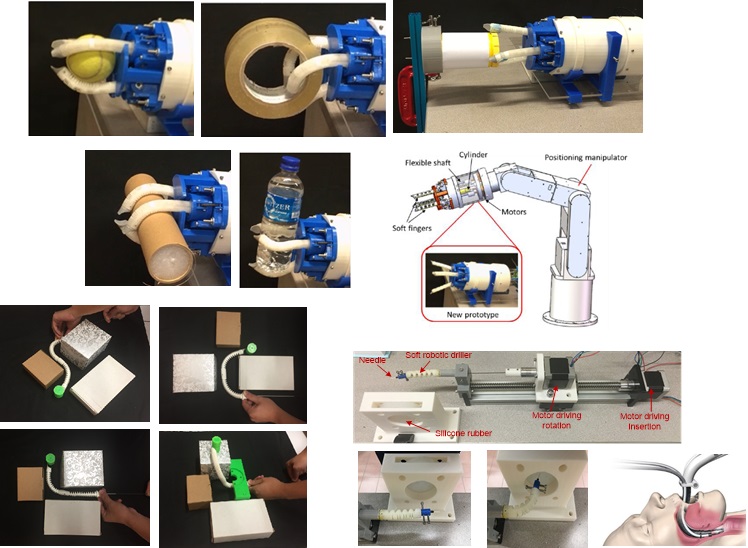
“Design, Characterization and Applications of a Novel Soft Actuator Driven by Flexible Shafts”, Mechanism and Machine Theory, vol. 122, pp. 197-218, 2018.
Calibration of Micro-nanopositioning Robots, LAP LAMBERT Academic Publishing, 2016.
"Toward a Framework for Robot-inclusive Environments", Automation in Construction, vol. 69, pp. 68-78, 2016.
“Compressive Sensing-Based Metrology for Micropositioning Stages Characterization”, IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 638-645, 2016.
“Calibration of Nanopositioning Stages”, Micromachines, vol. 6, no. 12, pp. 1856-1875, 2015.
“Characterization and compensation of XY micropositioning robots using vision and pseudo-periodic encoded patterns”, in IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014.
Calibration of single-axis nanopositioning cell subjected to thermal disturbance, in IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013.

