

黎卫兵
副教授
联系邮箱: liwb53@mail.sysu.edu.cn
教师简介:
jbo竞博电竞官方网站“百人计划”引进人才,广州市大湾区智能科技人才联合会理事、广东省医疗行业协会专科管理分会委员、粤港澳大湾区人工智能产业智库专家,2022年至2024年连续入选美国斯坦福大学发布的全球Top 2%科学家榜单,2023年广州市“青年科技人才托举工程”项目入选者。2018年获英国利兹大学机械工程博士学位,参与EPSRC资助的多个机器人相关科研项目。2018年至2020年于香港中文大学周毓浩创新医学技术中心(位于威尔斯亲王医院)从事博士后研究工作,参与香港研究资助局(RGC)和香港创新科技署(ITC)资助的多个医疗机器人相关科研项目。现主要从事神经计算和智能机器人研究,目前已发表学术论著100余篇,其中以第一作者/通讯作者发表领域内高水平IEEE汇刊长文19篇,获国际会议ICCR 2022最佳论文奖1项,ICRA 2024自动化最佳论文奖提名1项,申请发明专利10余项(已获授权发明专利5项),主持国家级、省部级以及市级等各级项目多项。
研究领域:
医疗机器人、工业机器人、人形机器人、灵巧机械手(机器人方向涉及自适应学习、优化控制、视觉伺服、人机交互、样机研制等);神经网络(深度学习、强化学习、类脑计算、数值算法);运筹学与控制论
课题组与国内外多个研究机构如英国利兹大学及香港中文大学已建立长期稳定的合作与交流关系
拟重点研究基于人工智能/大模型的机器人学习方法,长期欢迎对AI + Robotics感兴趣的研究生和本科生(专业不限)加入课题组
长期招收计算机、机械工程、自动化、电子信息、生物医学工程(排名无先后)等相关领域的博士后研究人员与专职科研系列人员
学生去向:2024届(第一届)本科毕业设计学生中,3名同学拿到Carnegie Mellon University、Johns Hopkins University、University of Pennsylvania、University of Copenhagen、University of Zurich、Nanyang Technological University、The University of Warwick、King's College London、University of Bristol等世界名校的研究生入学offer,2名同学获得学院推荐校级优秀本科毕业论文(位列学院所有答辩论文的前5%);2024届(第一届)硕士研究生中,1名同学(为非全日制学生,半工半读)校内申请读博成功,其他同学拟于科技大厂(如优必选、云深处)、三甲医院、国有金融企业、科研机构工作;课题组优秀在读研究生成功前往腾讯Robotics X机器人实验室学习。
课题组现有的机器人平台(含人形机器人、灵巧手、移动机器人、协作机械臂、力传感器、深度相机等)


人形机器人 & 灵巧手


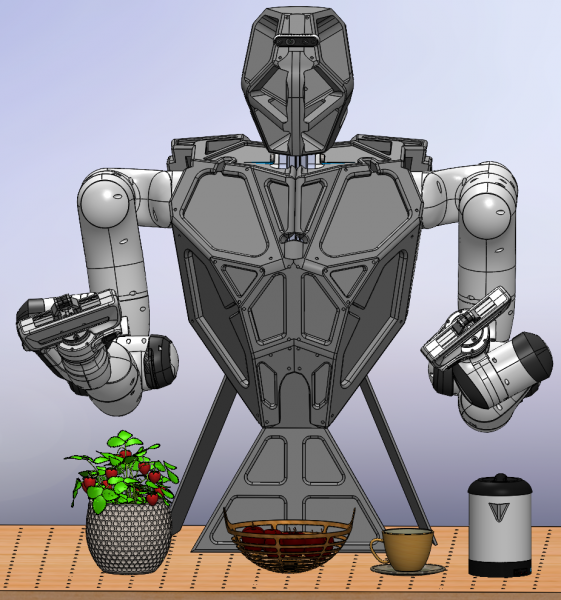
具身智能(大模型 + 深度强化学习 + 机器人,执行开门、抓取、清扫等居家任务) & 机器人障碍物躲避


dVRK + 柔性内窥镜 & UR5 + 柔性内窥镜


UR5 + MAGS内窥镜 & 脑活检机器人


机器人运动规划 & 物理性人机交互


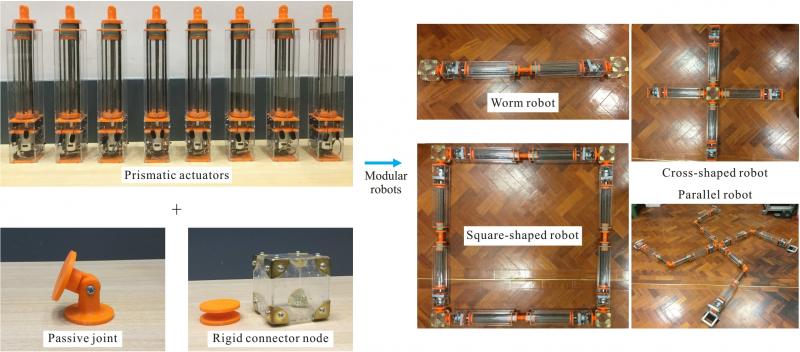
模块机器人
教育背景:
Ph.D. Thesis: Prismatic Modular Robotics Enabled Through Active and Passive Elements
Master Thesis: Motion Planning and Feedback Control of Fixed-Base and Mobile-Platform Manipulators
Bachelor Thesis: Research on Gesture Segmentation Techniques Based on Skin Color Detection
工作经历:
2020-至今,jbo竞博电竞官方网站,副教授
2018-2020,香港中文大学周毓浩创新医学技术中心,博士后研究员
2017-2018, 英国利兹大学机械工程学院,机器人助理
2016-2017,英国利兹大学机械工程学院,MECH5315M & MECH5090M研究生课程助教
海外经历:
2018-2020,香港中文大学周毓浩创新医学技术中心,博士后研究员
2017-2018, 英国利兹大学机械工程学院,机器人助理
2016-2017,英国利兹大学机械工程学院,MECH5315M & MECH5090M研究生课程助教
2014-2018,英国利兹大学机械工程学院,博士研究生
获奖及荣誉:
2024年IRAC国际会议最佳论文奖(Visual Exploration-Enhanced Quadruped Robot with Active-Passive Composite Telescope Mechanism)
2024年IRAC国际会议最佳论文提名奖(A Cerebellar Model Articulation Controller Enhanced Neural Solution to Time-Varying Linear Equations With Robotic Application)
2024年粤港澳大湾区IT应用系统开发大赛技术创新先锋奖(妙手神镜:多功能内窥镜手术机器人系统,与赵帅老师联合指导)
2024年粤港澳大湾区IT应用系统开发大赛一等奖(妙手神镜:多功能内窥镜手术机器人系统,与赵帅老师联合指导)
2024 年全国大学生计算机系统能力大赛操作系统赛功能挑战赛优秀指导教师奖(与赵帅老师联合指导)
2024年 ICRA国际会议(机器人三大顶会之一)自动化领域最佳论文提名奖
2023 年全国大学生计算机系统能力大赛操作系统赛功能挑战赛优秀指导教师奖(与赵帅老师联合指导)
2022 年ICCR国际会议最佳论文奖
2014-2017年英国利兹大学国际研究生全额奖学金
科研项目:
国家自然科学基金
广西省重点研发计划项目
广东省基础与应用基础研究基金
广州市基础研究计划基础与应用基础研究项目
广州市“青年科技人才托举工程”项目
广州市海珠区科技计划项目
高校基本科研业务费项目
jbo竞博电竞官方网站百人计划启动基金
课题组大创项目:1)基于大模型和RLHF的机器人多轮操作任务学习方 法研究;2)人机共融内窥镜机器人关键技术研究;3)智控未来:一种环境感知的生成式机器人控制 语言及正确性保障技术;4)手术机器人共性关键技术及其应用研究;5)非迭代式高效实时递归神经网络及其机器人障碍 物躲避应用研究。
主要学术兼职:
长期担任机器人及人工智能领域国际顶级期刊和会议如IEEE TNNLS、IEEE TCYB、IEEE/ASME TMECH、IEEE TIE、IEEE TII、IEEE TSMC、IEEE TCST、ICRA、IROS的审稿人
教授课程:
本科生课程:程序设计I、程序设计I实验、人工神经网络原理(深度学习)
研究生课程:高等数值计算方法、矩阵分析
代表性论著:
A mode-switcher-based neural solution to linearly constrained systems applied to robot obstacle avoidance, IEEE/ASME Transactions on Mechatronics, 2024, accepted.
A lower-dimension zeroing neural network for time-variant quadratic programming applied to robot pose control, IEEE Transactions on Industrial Informatics, 2024, 20(10): 11835-11843.
A quadratic programming solution to position-level repetitive motion planning and obstacle avoidance of joint-constrained robots, IEEE Transactions on Industrial Electronics, 2024, accepted.
Novel neural controllers for kinematic redundancy resolution of joint-constrained Gough-Stewart robot, IEEE Transactions on Industrial Informatics, 2024, 20(3): 4559-4570.
A noniterative neural algorithm involving Dini derivatives for visual servoing of joint-constrained robotic endoscope, IEEE Transactions on Industrial Electronics, 2024, 71(8): 9520-9529.
A Dini-derivative aided zeroing neural network for time-variant quadratic programming involving multi-type constraints with robotic applications, IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(9): 12482-12493.
A strictly predefined-time convergent and noise-tolerant neural model for solving linear equations with robotic application, IEEE Transactions on Industrial Electronics, 2024, 71(1): 798-809.
Efficient composite learning robot control under partial interval excitation, IEEE International Conference on Robotics and Automation (ICRA), 2024: 21-26. (自动化最佳论文奖提名)
A novel neural approach to infinity-norm joint-velocity minimization of kinematically redundant robots under joint limits, IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(1): 409-420.
Comparisons of RCM generation algorithms for vision-controlled robotic endoscope, International Conference on Control and Robotics (ICCR), 2022: 222-228. (最佳论文奖)
A kinematic modeling and control scheme for different robotic endoscopes: A rudimentary research prototype, IEEE Robotics and Automation Letters, 2022, 7(4): 8885-8892.
A strictly predefined-time convergent neural solution to equality- and inequality-constrained time-variant quadratic programming, IEEE Transactions on Systems, Man and Cybernetics: Systems, 2021, 51(7): 4028-4039.
Deep learning assisted robotic magnetic anchored and guided endoscope for real-time instrument tracking, IEEE Robotics and Automation Letters paper presented at 2021 International Conference on Robotics and Automation (ICRA), 2021, 6(2): 3979-3986.
An autonomous robotic flexible endoscope system with a DNA-inspired continuum mechanism, in: Proceedings of the 2021 International Conference on Robotics and Automation (ICRA), 2021: 12055-12060.
Kinematic modeling and visual servo control of a soft-bodied magnetic anchored and guided endoscope, IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1531-1542.
An accelerated recurrent neural network for visual servo control of a robotic flexible endoscope with joint limit constraint, IEEE Transactions on Industrial Electronics, 2020, 67(12): 10787-10797.
An accelerated finite-time convergent neural network for visual servoing of a flexible surgical endoscope with physical and RCM constraints, IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(12): 5272-5284.
A novel flexible robotic endoscope with constrained tendon-driven continuum mechanism, IEEE Robotics and Automation Letters, 2020, 5(2): 1366-1372.
A semi-autonomous stereotactic brain biopsy robot with enhanced safety, IEEE Robotics and Automation Letters paper presented at 2020 International Conference on Robotics and Automation (ICRA), 2020, 5(2): 1405-1412.
A finite-time convergent and noise-rejection recurrent neural network and its discretization for dynamic nonlinear equations solving, IEEE Transactions on Cybernetics, 2020, 50(7): 3195-3207.
New varying-parameter ZNN models with finite-time convergence and noise suppression for time-varying matrix Moore-Penrose inversion, IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(8): 2980-2992.
Predefined-time convergent neural solution to cyclical motion planning of redundant robots under physical constraints, IEEE Transactions on Industrial Electronics, 2020, 67(12): 10732-10743.
Design and analysis of a novel finite-time convergent and noise-tolerant recurrent neural network for time-variant matrix inversion, IEEE Transactions on Systems, Man and Cybernetics: Systems, 2020, 50(11): 4362-4376.
A tri-state prismatic modular robotic system, Mechatronics, 2019, 64: 102287.
A variable-gain finite-time convergent recurrent neural network for time-variant quadratic programming with unknown noises endured, IEEE Transactions on Industrial Informatics, 2019, 15(9): 5330-5340.
A recurrent neural network with explicitly definable convergence time for solving time-variant linear matrix equations, IEEE Transactions on Industrial Informatics, 2018, 14(12): 5289-5298.

